论文解读 | 皮质电图系统与软机器人致动器的完美结合
研究内容
主要研究内容是关于一种电皮层图谱系统的部署,该系统使用软体机器人致动器。论文详细介绍了该系统的制造和实验方法,并提供了相关的图表和参考文献。该系统的设计旨在提高电皮层图谱系统的灵活性和可植入性,以便更好地监测脑电信号。

创新点
1.该研究提出了一种新型的电皮层图谱系统,该系统使用软体机器人致动器,可以提高系统的灵活性和可植入性。
2. 该系统的制造方法采用了一种新型的PDMS涂覆技术,可以在硅晶圆表面涂覆200微米厚的PDMS层,并在75℃的对流烤箱中固化3小时。
3. 该系统的实验方法采用了一种新型的电刺激方法,可以在不损伤皮层组织的情况下激活电极。
4. 该研究还对该系统的性能进行了测试和评估,证明了该系统可以有效地监测脑电信号,并具有良好的稳定性和可重复性。
03
新技术运用
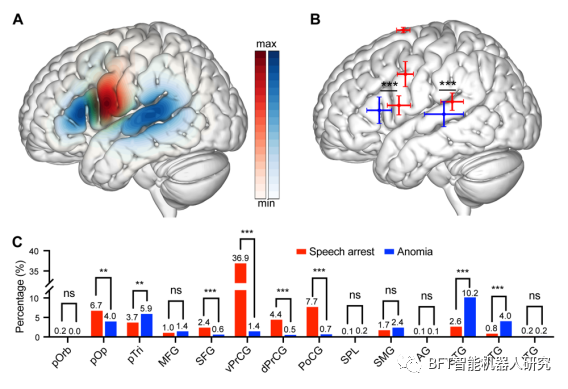
a.电皮层图谱技术:
电皮层图谱技术是一种用于监测脑电信号的方法,可以通过在大脑表面植入电极来记录神经元的活动。该技术已经被广泛应用于神经科学研究和临床诊断。
b.软体机器人技术:
软体机器人是一种新型的机器人技术,具有高度的柔性和可塑性,可以适应各种复杂的环境和任务。该技术已经被广泛应用于医疗保健、生物医学工程和机器人手术等领域。
c.PDMS材料:
PDMS是一种常用的弹性体材料,具有优异的生物相容性和化学稳定性,已经被广泛应用于生物医学工程和微流控系统等领域。
d.电刺激技术:
电刺激技术是一种用于激活神经元的方法,可以通过在神经元周围施加电场来引发神经元的兴奋。该技术已经被广泛应用于神经科学研究和临床治疗。
实验
1. PDMS涂覆:
首先,在硅晶圆表面创建一个疏水单层,然后使用手动薄膜涂布机在硅晶圆表面涂覆200微米厚的PDMS层。接下来,在75℃的对流烤箱中固化3小时。
2. 制备电极阵列:
将23微米厚的PET薄膜层压在PDMS顶层上作为阴影掩膜。使用飞秒准分子激光器切割出直径为11.0毫米的中心孔,而空气口袋图案仅切割23微米厚的PET薄膜。然后,将带有空气口袋图案的PET薄膜选择性剥离,并使用O2等离子体激活顶层的PDMS表面。在等离子体激活的PDMS顶层上旋涂一层牺牲层(15wt%的Dextran溶液),然后在室温下干燥5分钟。接下来,从顶层中去除整个PET阴影掩膜,形成电极阵列。
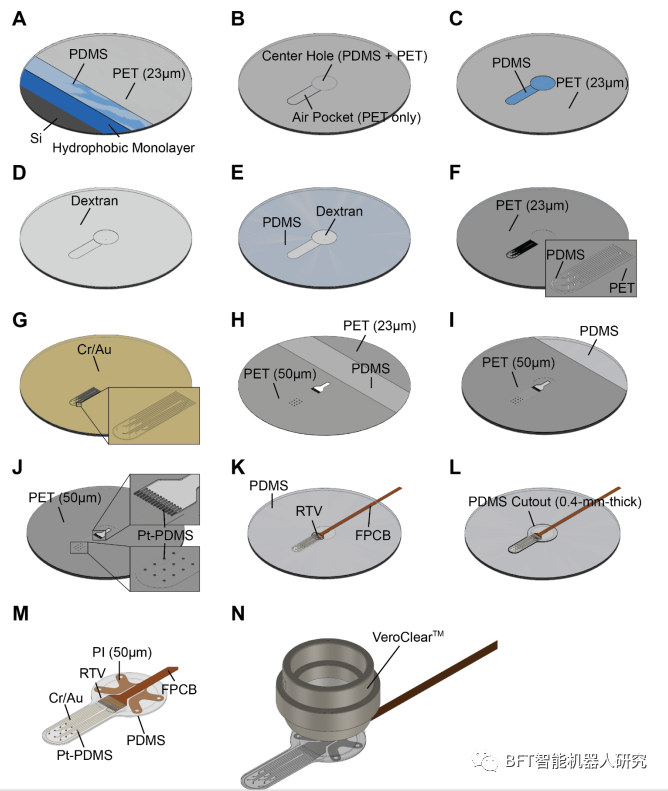
图S1可展开的柔性机器人ECoG阵列的制造工艺(A)PDMS顶层的制备(疏水单层的沉积、200um厚PDMS层的刀片涂覆和23um厚PET膜的层压),(B)将整个PDMS顶层切割成具有中心孔图案,同时选择性地切割具有气囊图案的23um厚PET膜,(C)将图案为气囊和中心孔的23um厚PET膜分层,随后通过02等离子体活化,(D)涂葡聚糖层,(E)去除23um厚的PET掩模上的葡聚糖层并刮涂100um厚的PDMS底层,(F)层压和激光切割具有互连和应变传感器图案的23um厚PET膜作为负掩模。(G)热蒸发铬(5nm厚)和金(35nm厚),(H)通过在100um厚PDMS层的两面上层叠C23m厚和50pm厚的PET膜来制造封装PDMS层,(1)使用02等离子体活化将封装PDMS层结合到PDMS底层上铂涂层(Pt)-PDMS复合到电极位点和状图案上以用于FPCB连接,(K)组装FPCB用RTV化连接位点,(L)用软机器人ECoG阵列图案切割整个组装的PDMS层,(M)用水去除软的机器人ECOG阵列内的葡聚糖牺牲层,并组装50um厚的聚疏亚胺(PI)制造的机械支撑,(N)组装3D打印的装载器连接器和中心筒,所述中心筒分别用PDMS的注射成型制备。
3.实验测试:
将电极阵列植入动物的大脑表面,然后使用电刺激技术激活神经元。通过记录电极信号,评估电极阻抗、电极信号质量、电极位置和电刺激效果等方面的数据。
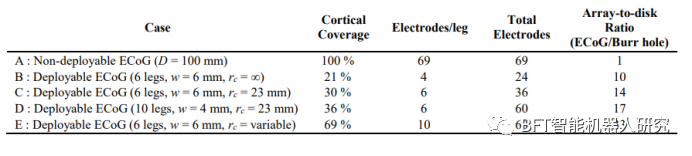
表中。S1图中不同软机器人ECoG阵列配置的设计矩阵。S9
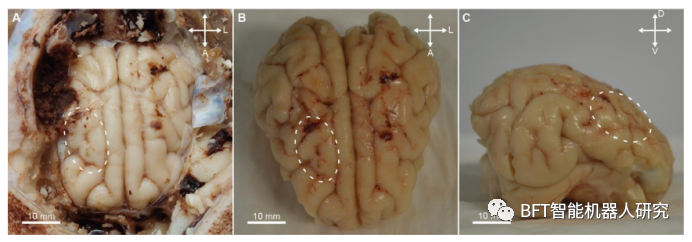
图S6|软机器人ECOG阵列外翻后灌注小型猪脑的照片(A)提取前灌注脑的照片。(B)(B)从顶部提取的大脑的照片和(C)从右半球提取的大脑。所有图像中的虚线显示了与可部署ECoG阵列接触的大致位置。
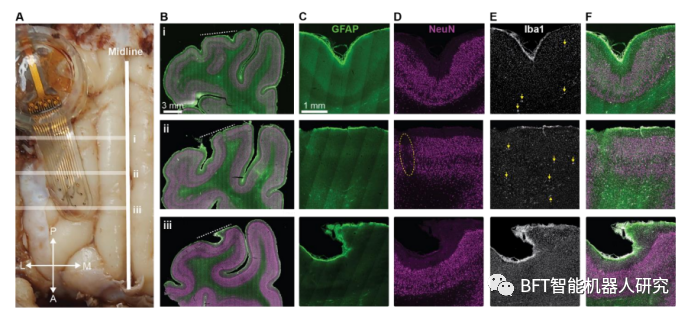
图S7部署后的死后脑组织学分析(A)拔牙前灌注脑的照片,显示植入物在皮质上的部署位置和分析的冠状切片的位置。区域、i和而,分别对应于所部署的植入物的基部、柄部和尖端)。(B)显示了三个位置的联合染色的整个切片。白色虚线表示种植体的大致位置。用于(C)GFAP、 D) NeuN (E) bal和()他们的组合。分别。D-区皮层的陪区(以黄色圆表示)显示神经元的丢失。E-1和E-1(以黄色箭头为例)的白点和亮点显示小胶质细胞激活。注意,在第三节中没有发现胶质细胞活化、星形胶质细胞增殖和神经元丢失。
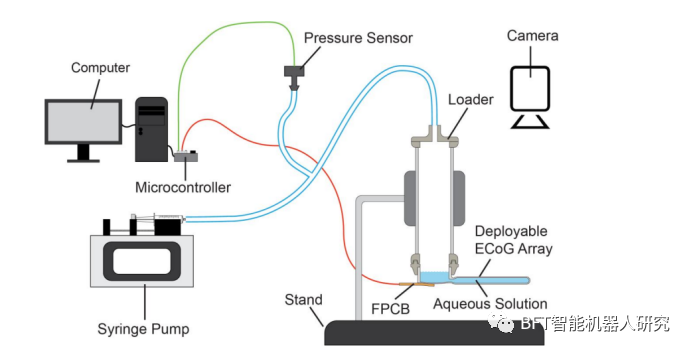
图S10实验装置用于体外表征可展开ECoG阵列的折叠和展开的实验装置的示意图。
05
实验结论
该电皮层图谱系统使用软体机器人致动器,采用PDMS涂覆技术制造的电极阵列和电刺激技术,可以有效地监测脑电信号,并具有良好的稳定性和可重复性。
该系统具有较低的电极阻抗和较高的信号质量,可以提高电极的灵敏度和准确性。此外,该系统的软体机器人致动器可以提高系统的灵活性和可植入性,可以适应不同的实验需求和动物模型。
06
可运用领域
1. 该系统使用软体机器人致动器,可以提高系统的灵活性和可植入性。该系统的设计可以为神经科学研究和临床诊断提供更加灵活和可靠的工具。
2. 采用PDMS涂覆技术制造的电极阵列具有较低的电极阻抗和较高的信号质量,可以提高电极的灵敏度和准确性。这种制造方法可以为电皮层图谱技术的发展提供新的思路和方法。
3. 采用电刺激技术可以在不损伤皮层组织的情况下激活电极,从而实现对神经元的有效控制。该系统的软体机器人致动器可以提高系统的灵活性和可植入性,可以适应不同的实验需求和动物模型。这种技术可以为神经科学研究和临床治疗提供新的手段和方法。
关于BFT白芙堂机器人
BFT(白芙堂)机器人是智能机器人一站式服务平台,能为客户提供机器人选型、培训、解决方案、在线采购、本地化定制等高性价比的一站式服务。平台产品涵盖协作机器人、工业机器人、移动机器人、SCARA机器人、服务机器人、机器人夹爪、三维机器视觉设备、3D工业相机等十余种品类,实现机器人产业链产品全覆盖,并广泛应用于工业制造、实验室自动化、智慧零售、教育科研等行业。平台已与国内外知名机器人企业达成战略合作,并拥有专业的工程师团队,能为客户提供算法及系统定制、职校教学、科研实验室平台搭建、机器人展厅定制等服务,支持一对一技术支持和二次开发。