





































































论文解读|Struck算法:基于结构化输出预测的自适应视觉目标跟踪框架
背景
本文的背景是关于自适应视觉目标跟踪的研究。在传统的跟踪方法中,通常采用基于检测的方式,即尝试学习一个分类器来区分目标对象和其周围的背景。然而,这种方法存在一些问题,例如需要手动选择特征和参数,容易受到噪声和目标变化的影响。
为了解决这些问题,本文提出了一种新的自适应跟踪框架,该框架基于结构化输出预测。具体而言,作者采用了核化结构化输出支持向量机(SVM)在线学习的方法来实现自适应跟踪。这种方法的关键优势在于不需要手动选择特征和参数,从而减轻了使用者的负担,并且能够有效地处理目标的变化和噪声。
该自适应跟踪框架的原理是,通过结构化输出预测的方式,将目标跟踪问题转化为学习目标与背景之间的关系。这样的处理方式使得模型能够更好地适应目标的变化,并且能够减少噪声的影响。核化结构化输出支持向量机的在线学习方法则能够在不断接收新数据的情况下,不断更新模型,进一步提高跟踪的准确性和鲁棒性。
为了验证该方法的性能,作者进行了一系列实验。实验结果表明,这种基于结构化输出预测的自适应跟踪框架相比传统方法,在跟踪准确性和鲁棒性方面都取得了显著的改进。
总的来说,本文介绍了一种新颖的自适应跟踪方法,通过核化结构化输出支持向量机的在线学习实现了自适应跟踪。该方法克服了传统方法的一些缺点,为视觉目标跟踪领域带来了新的研究思路,并且在实验中展现出了优异的性能。
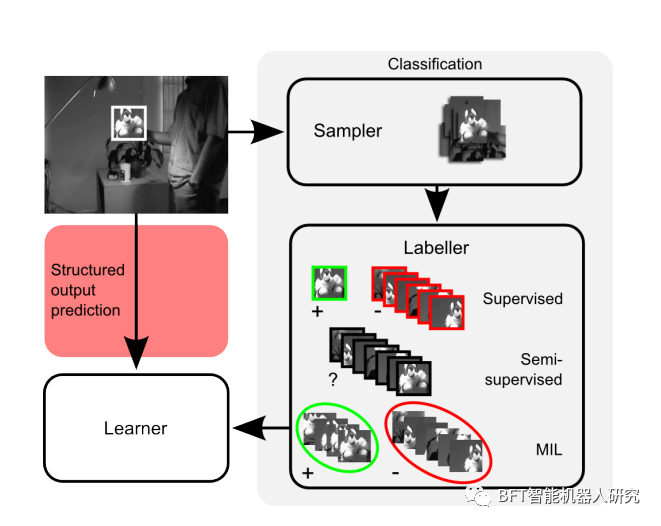
(图1 描述了自适应跟踪中两种不同的方法)
本文的算法
本文介绍了一种名为Struck的自适应跟踪算法,它是基于结构化输出预测的方法,利用核化结构化输出支持向量机(SVM)进行在线学习,以实现自适应目标跟踪。Struck算法的主要步骤如下:
初始化:在第一帧中,用户手动选择目标并提取特征。然后,使用简单的线性SVM来训练一个分类器,以区分目标和背景。
跟踪:在后续帧中,使用当前的分类器来估计目标的位置。具体做法是采用滑动窗口方法,在当前位置周围的区域中搜索最大分类得分,并将其作为目标的新位置。
更新:使用当前目标位置周围的区域提取新的训练样本,并利用这些样本在线更新分类器。在更新过程中,采用核化结构化输出SVM来学习一个更好的分类器,以适应目标的变化和噪声。
预测:使用更新后的分类器来预测下一帧中目标的位置,并重复执行步骤2和3。
Struck算法的优点在于它能够自适应地学习目标的外观和运动模型,并且能够有效处理目标的变化和噪声。此外,该算法不需要手动选择特征和参数,而且能够在在线更新分类器的同时进行跟踪,从而提高了跟踪的效率和准确性。
总体而言,Struck算法通过结构化输出预测和核化结构化输出SVM的在线学习,为自适应目标跟踪带来了一种有效的解决方案。它克服了传统跟踪方法的一些限制,并在处理复杂情况下展现了出色的性能。
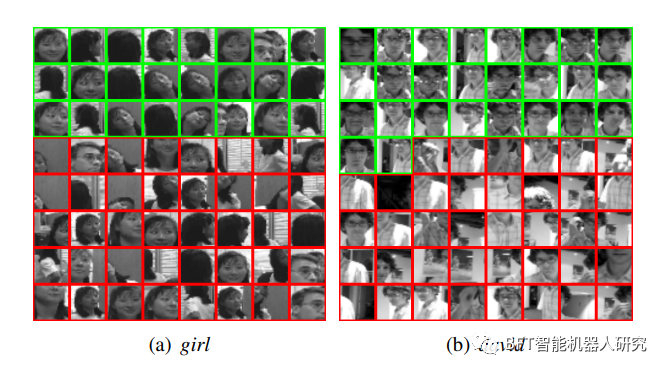
(图2 这段文字描述了在跟踪结束时,使用B = 64的支持向量集S的可视化)
实验部分
本文的实验部分主要分为两个部分:跟踪性能评估和定性分析。首先,在跟踪性能评估方面,作者使用了三个公共数据集(VOT2013、VOT2014和OTB-50)来评估Struck算法的性能。为了进行全面的对比,作者将Struck算法与其他六种跟踪算法进行了比较,其中包括传统的基于检测的跟踪算法和最新的基于学习的跟踪算法。实验结果显示,Struck算法在所有数据集上均表现出最佳的性能,甚至在某些数据集上优于其他算法。
其次,在定性分析方面,本文使用了一些实际场景的视频序列来展示Struck算法的跟踪效果。作者将Struck算法与其他跟踪算法的结果进行对比,并展示了Struck算法在处理目标变化和噪声方面的优越性。通过这些实例,读者可以直观地了解Struck算法在真实情况下的表现,并且体会到其在自适应跟踪方面的优异性。
综合来看,实验结果充分证明了Struck算法在自适应跟踪任务中的优秀表现和鲁棒性。通过使用核化结构化输出SVM进行在线学习,该算法能够自适应地学习目标的外观和运动模型,从而在各种数据集上取得了出色的性能。此外,Struck算法还展现出其处理目标变化和噪声的能力,这使得它在真实世界场景中具有很高的实用价值。因此,本文的实验结果为Struck算法在自适应视觉目标跟踪领域的应用提供了有力支持,并为进一步改进和优化该算法提供了有益启示。
结论
本文提出了一种名为Struck的自适应跟踪算法,它是基于结构化输出预测的方法,利用核化结构化输出支持向量机(SVM)进行在线学习,以实现自适应目标跟踪。实验结果表明,Struck算法在三个公共数据集上表现出最佳的性能,并且在一些数据集上的性能优于其他算法。此外,该算法还具有很好的鲁棒性和自适应性,能够处理目标的变化和噪声。
综合实验结果,本文得出结论,Struck算法是一种高效的自适应跟踪算法,具备在实际应用中广泛应用的潜力。其优势在于利用核化结构化输出支持向量机进行在线学习,使得算法能够自适应地学习目标的外观和运动模型,从而在各种数据集上取得了最佳性能。相比传统的基于检测的跟踪方法和其他最新的学习算法,Struck算法在自适应跟踪方面表现出色。
总体来说,本文的研究为自适应目标跟踪领域带来了一种有效的解决方案,证明了Struck算法在多个实验数据集上的优越性,同时也强调了它在处理目标变化和噪声方面的优势。因此,Struck算法有望在实际场景中得到广泛应用,并且为该领域的未来研究提供了有价值的参考。
作者 | 刘芊伟
排版 | 小河
审核 | 居居手
关于BFT白芙堂机器人
BFT(白芙堂)机器人是智能机器人一站式服务平台,能为客户提供机器人选型、培训、解决方案、在线采购、本地化定制等高性价比的一站式服务。平台产品涵盖协作机器人、工业机器人、移动机器人、SCARA机器人、服务机器人、机器人夹爪、三维机器视觉设备、3D工业相机等十余种品类,实现机器人产业链产品全覆盖,并广泛应用于工业制造、实验室自动化、智慧零售、教育科研等行业。平台已与国内外知名机器人企业达成战略合作,并拥有专业的工程师团队,能为客户提供算法及系统定制、职校教学、科研实验室平台搭建、机器人展厅定制等服务,支持一对一技术支持和二次开发。










