





































































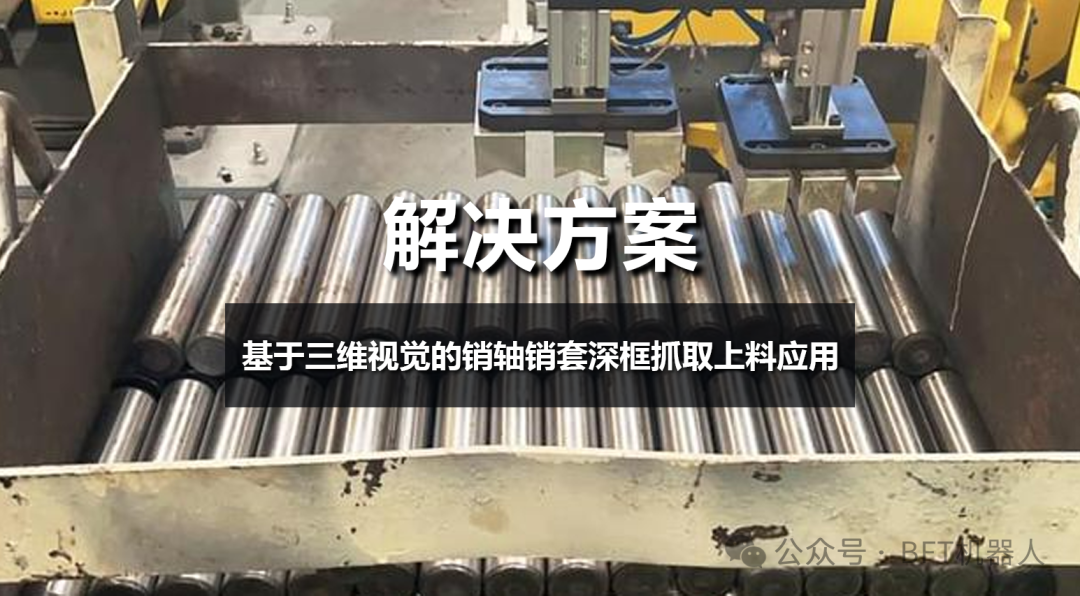
解决方案|基于三维视觉的销轴销套深框抓取上料应用
随着科技的不断发展,机器人技术不断革新,并逐渐渗透到各行业的各个环节。在机器人技术的帮助下,各行业的生产力不断增强,生产效率也得到了极大的提高。
销轴销套深框抓取是指在机械装配或生产过程中,对销轴和销套进行抓取和定位的操作。由于销轴是一种圆柱形零件,通常带有凸起的几何特征,在抓取时容易掉落。
如何实现精确的插入和拔出操作,确保销轴准确地插入销套,并能在需要时顺利拔出,一直是困扰工厂的一个问题。
传统销轴销套深框抓取上料的痛点
在传统工业生产线中,销轴销套的抓取和上料通常使用人工操作。由于销轴销套具有一定重量,频繁地抓取上料劳动强度大,这对于实现大规模和高效生产来说存在一些挑战和限制,其痛点主要如下:
销轴、销套种类多,人工频繁搬运上料劳动强度较大,生产效率无法满足生产需求。
2.销轴销套乱序摆放在深框内,无法实现精准抓取。
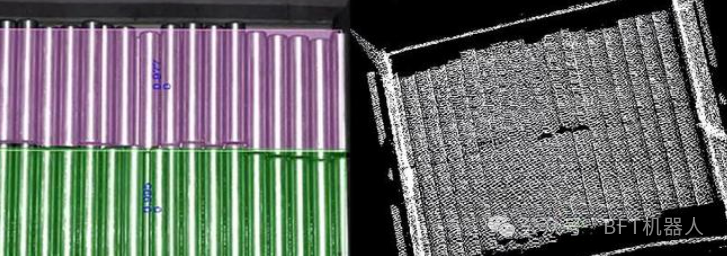
3.轴类工件表面具备反光特性,难以稳定生成点云数据,识别难度大。

另外,由于高产量要求,生产线不得不连续运作。操作员在操作时,由于疲劳、注意力不集中或者经验不足等因素,容易抓取和放置错误,无法满足高速抓取和放置动作的准确性和一致性,对企业具有较大负面影响。
解决方案
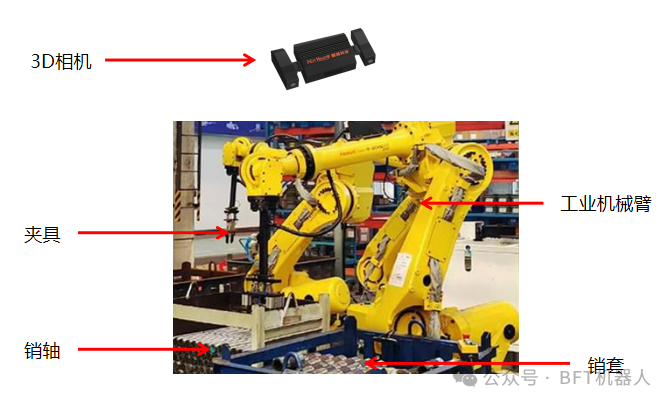
引入3D视觉+机械臂抓取上料方案,进行自动化改造,形成自动化抓取系统,该系统主要包含以下内容:
1.3D相机:捕捉销轴销套深框的准确三维坐标信息,为机械臂提供精确的实时定位信息。
2.工业机械臂:执行抓取放置任务的机械臂,需要具备足够的负载能力和精度去实现准确、稳定的抓取动作。
3.夹具:连接在机械臂上的执行器,负责抓取和放置销轴销套。
4.控制系统:包括机机械臂控制器、视觉处理模块等,负责协调和控制整个系统的运行。
5.智能算法:包括物体识别、定位、路径规划等算法,用于调整抓取方案,以适应不同工况和物料状态,确保系统能够正确执行任务。
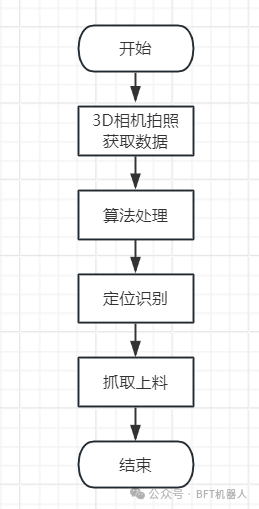
项目流程
1.3D相机拍照:3D相机对工作区域进行扫描,获取实时的三维点云数据,并提取销轴销套深框的形状、尺寸、颜色等特征。
2.算法处理:利用三维点云数据,建立销轴销套的三维物体模型,确定目标物体的形状、位置和姿态。
3.定位识别:3D视觉系统实时监测工作区域,根据训练好的模型,识别销轴销套的位置,并即时反馈给机械臂控制系统。
4.抓取上料:机械臂控制系统根据目标位置和姿态信息规划抓取路径,精准地抓取销轴销套放置到指定上料台。
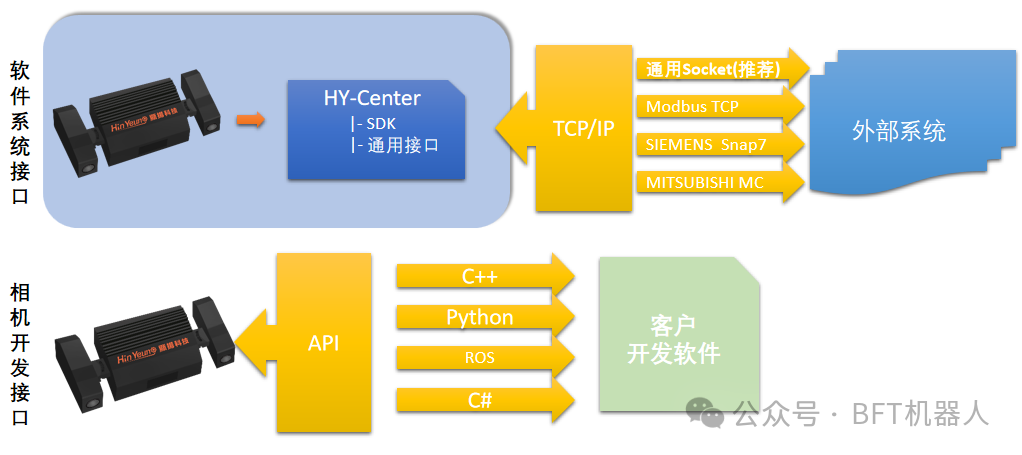
通讯协议
方案优势
1.高精度:采用显扬科技3D结构光相机,高精度,可对体积较小、表面反光的销轴销套生成高质量的点云数据。

2.高效率:采用3D视觉+机械臂实现自动化操作,能够实时反馈数据,提高上料过程的效率。
3.适应性强:该系统能够适应不同形状和尺寸的销轴销套深框的高精度识别,具有较强的灵活通用性。
4.安全性能高:配备三维视觉的系统可以实时监测周围环境,及时发现障碍物或异常情况,确保抓取上料操作的安全。
BFT机器人平台提供先进产品与机器人自动化技术,助力企业智能化转型升级,为您的企业生产注入发展新动能。BFT将竭诚为您提供机器人技术咨询与方案设计服务,为您提供最具价格优势的产品!

关于BFT白芙堂机器人
BFT(白芙堂)机器人是智能机器人一站式服务平台,能为客户提供机器人选型、培训、解决方案、在线采购、本地化定制等高性价比的一站式服务。平台产品涵盖协作机器人、工业机器人、移动机器人、SCARA机器人、服务机器人、机器人夹爪、三维机器视觉设备、3D工业相机等十余种品类,实现机器人产业链产品全覆盖,并广泛应用于工业制造、实验室自动化、智慧零售、教育科研等行业。平台已与国内外知名机器人企业达成战略合作,并拥有专业的工程师团队,能为客户提供算法及系统定制、职校教学、科研实验室平台搭建、机器人展厅定制等服务,支持一对一技术支持和二次开发。










